
The Hangar
Agile Class
The Agile Class consists of multipurpose drones used primarily for research and development. These drones are built to take a hit and can be outfitted with new gear for initial field-testing before being permanently mounted to one of the competition drones.
Agile Class Drones

Panic
Panic was the first multirotor to be built by the team at Missouri S&T. Like CAPTAIN, Panic was designed to be a test platform so that whenever the team needed to try out new electronics or parts they could first be tested on Panic’s simple and robust frame. Panic’s frame is composed of four 3D printed nylon arms, two laser-cut polycarbonate base plates, and a series of 3D printed electronics housings. To date, Panic has flown many test flights testing cameras, autonomous software, motors, and other parts.

Sparky
Built in Fall 2019 as the team’s primary testing platform, Sparky was originally constructed from an out-of-the-box carbon fiber frame and salvaged parts from previous projects. The night before her maiden flight, as the battery was being connected for the final test, one of our hardware engineers learned that carbon fiber is conductive and thus the platform was dubbed “Sparky.” After hundreds of miles of previously untested software, dozens of takeoffs and landings, and at least ten unexpected encounters with plant life, Sparky now looks very different from the original build. Testing platforms like this are perhaps the most important steppingstone for one of our builds – the agile nature allows for quick swaps between configurations, easy replacements, and high durability as a system learns how to fly. Sparky has been the cornerstone of our attempts for IARC Mission 9, SUAS 22, and various other projects our team has taken on since construction. The platform’s history and intense usage has made it a favorite among many of our members.

PR Drone v1 and v2
The Multirotor Robot Design Team attends many recruitment and outreach events throughout the year, and often enjoys performing live flight demonstrations. To better suit our needs, we decided to design a multirotor robot focused on safety and aesthetics. The goal is to have a multirotor that is safe to fly indoors and near crowds of people, that also looks great and represents our team. The frame will be composed of lightweight and strong carbon fiber with foam circling the edges of the propellers for extra safety. It will also sport an array of LEDs that catch the eyes of anyone watching the flight!

Captain
CAPTAIN Stands for Changeable Active Platform for Testing Applications, Iterations, and Navigation tools. This was the team’s first ever multirotor before it was an official Design Team at Missouri S&T and was designed and built at Timberland high school in 2015. CAPTAIN was initially meant to be a modular test platform for trying out different electronics and parts, but after a crash that destroyed his 3D printed frame, the team decided to moved on to bigger and better drones.

Maverick
The goal for Maverick was to help test prototype software and replace sparky. Maverick has a cube, raspberry pi, two batteries, and GPS module. This helps prepare our team for our annual SUAS competition.

Y – 6
This is our first drone frame that is designed with leftover carbon fiber. Y-6 was designed for research and experimentation with the goal of AI drone racing. It’s built to support autonomous flight codes and durability.

Jellyfish
Jellyfish tests our autonomous flight capabilities with CubePilot technology. Most often it can be seen testing waypoint missions for SUAS without additional payload. It’s also our newest research drone built for iteration and durability.
Swift Class
Swift Class quads are built for manual FPV racing by our Multirotor Racing division. We compete in a variety of drone races across the state and are always looking for new pilots to give these guys a whirl!
Swift Class Drones

Joe Flyer
A racing drone with the aim to increase the knowledge and skills of drone flight to newer members. Joe Flyer, made in 2021, is very versatile as it is used for both training and competitive racing. This drone was built to be the first of a fleet of team-owned racing drones which allow members to participate in races without needing to spend the large upfront cost of building a drone.

Tiny Trainers
The team’s newest and smallest swift class drone with 3″ props were introduced in 2022. Tiny Trainers are used to both train new members on a smaller, less risky airframe, as well as compete in events. These drones are commonly used in indoor races, like the one hosted here on campus inside Gale-Bullman!
Rogue Class
Drones in the Rogue Class are custom-built for a highly specialized purpose. Multirotor has taken on projects involving complex systems for challenges like drone swarming and even high-altitude deployment from a rocket.
Rogue Class Drones

Turtle Drone
Each frame utilizes our standard array of sensors necessary for autonomous flight: Flight board, companion computer, optical sensor, and laser range finder. There were several themes and ideas for the drone, such as Bees, Turtles, and Smart Assistants. Ultimately, turtles won the popular vote and the team’s Mission 8 aerial vehicles have a Teenage Mutant Ninja Turtles (TMNT) theme. The current mission proposed by the IARC requires our autonomous aerial robot to guide autonomous ground robots to one side of a playing field by interacting with them physically through touch. Each ground robot is outfitted with bump sensors that, when activated, cause the robot to turn in a certain direction. This means that Sentinel must identify the ground robots, recognize which direction they are travelling, know which direction they need to go, and run a decision making process to decided what it needs to do to the robot in order to get it to go in the correct direction, all autonomously!
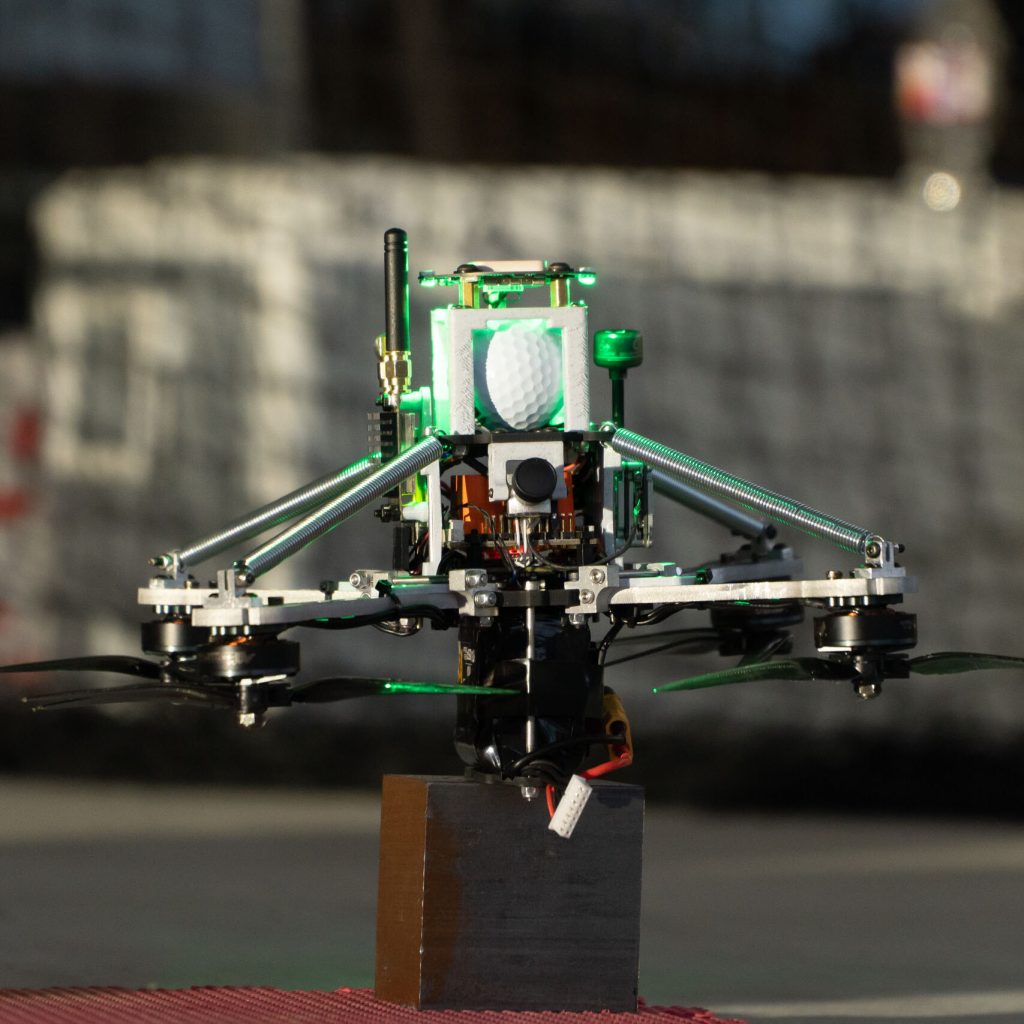
Kraken
For the Argonia Cup, Multirotor decided to partner with the Rocket Design Team in order to create the ultimate collaboration project. Our Argonia drone is meant to fit in the 5 inch diameter of a rocket. It’s then sent up in the air past 8,000 feet, and then ejected on the way down, where our top notch pilots will pilot the drone with an FPV setup to a specific target and deliver the golfball payload attached to it. Most schools will use a Rocket and a parachute to do it, but we wanted to do something a little more special.

Cuddlefish
Our team’s second iteration drone for the Argonia Cup competition, Cuddlefish. This design had many of the same features of the Kraken – spring-loaded arms with foldable props and a cylindrical frame design allow the drone to condense into the five-inch payload compartment of the Gemini rocket designed by Missouri S&T’s Rocket Design Team. After a launch at 12Gs and 20 second ascent to 9000 feet, Cuddlefish was able to detach from the rocket and safely return the payload home. The biggest design change from Kraken was the release mechanism. The hardware team developed a hook & latch system powered by a servo motor to give the pilot control over when to let go of the rocket and begin the descent journey. Our unique design and well-engineered semiautonomous systems also allowed us to be the only team capable of an immediate relaunch using the same equipment. While most of our competition brought a separate drone and rocket for each flight attempt, the Missouri S&T team only brought one of each and were able to rely on the system to be fully recoverable with no repairs backups.

Sentinel
Sentinel is the team’s first competitive autonomous multirotor designed to compete in the International Aerial Robotics Competition. The current mission proposed by the IARC requires our autonomous aerial robot to guide autonomous ground robots to one side of a playing field by interacting with them physically through touch. Each ground robot is outfitted with bump sensors that causes the robot to turn in a certain direction. This means that Sentinel must identify the ground robots, recognize which direction they are travelling, know which direction they need to go, and run a decision making process to decide what it needs to do to the robot in order to get it to go in the correct direction, all autonomously! Sentinel will be carrying many types of on-board electronics that will enable it to fly completely autonomously and identify targets based on shape and color.

Bone Drone
Bone Drone was made for the 2023 Argonia Competition. It has a bone theme frame design, hence the name. The goal for this drone design was to be able to fit into a rocket, but also be manually flown after being released 10,000ft from the air. During the competition, the drone fell from 10,000ft and survived and was still able to fly with minimal damage.
Goliath Class
Goliath Class drones are the kings of our autonomous competitions. Weighing in close to the legal limit of 55 pounds, each of these monster drones is built to fly outdoors for missions involving endurance, power, and carrying capacity.
Goliath Class Drones

BFD
Also known as Big Flying Drone, this is one of our largest and most ambitious projects yet. BFD is a coaxial quad drone with two 12S batteries on it. It has a flight computer that processes forward facing computer vision to identify objects. The goal for its competition was to match the sway of a boat mast and replace an antenna module on the pole.

G.U.A.R.D.I.A.N.
Global Unmanned Analysis and Reconnaissance Drone with Intelligent Autonomous Navigation (AKA Guardian) was built for the Student Unmanned Aerial Systems competition. It has a quad X configuration, and it was built to identify objects on the ground, then based on the location of those points, land and allow for an RC car to travel from the drone to a specified location. G.U.A.R.D.I.A.N. was a proving ground for the team as it was one of the first attempts at a big outdoor drone.